
For many years, we have been using systems with safer-programmable controls (PLC systems) in our weighing and dosing systems. Our systems operate as local systems in the sensor/actuator level. Optionally, we implement parent distributed systems regardless of the installed local systems.
All controllers can be equipped with long-term data archives to ensure conclusions about the production process at any time or to maintain historical measurement series within the framework of quality assurance.
In an gravimetric Loss-in-Weight Dosing controller according to the differential process, the mass flow is determined as follows: The system weight is recorded after a measurement time Δt. The weight loss ΔG after the measurement time determines the amount of dosed material per time (mass flow =ΔG / Δt)
Consequences of Differential Dosing
The current mass flow measurement is only available after a discrete time. The Dosing Controller always has to wait a measurement time before a correction of the mass flow can be initiated (“the conroller always runs after”)
Solution
Use of an Integral Dosing Controller working in Loss in Weight mode:
Integrating Dosing Controllers according to the gravimetric Loss in Weight method are suitable for the precise dosing of liquids, pastes and bulk materials (powders, granules, fibres, etc.)
Important Features are
Working Principle
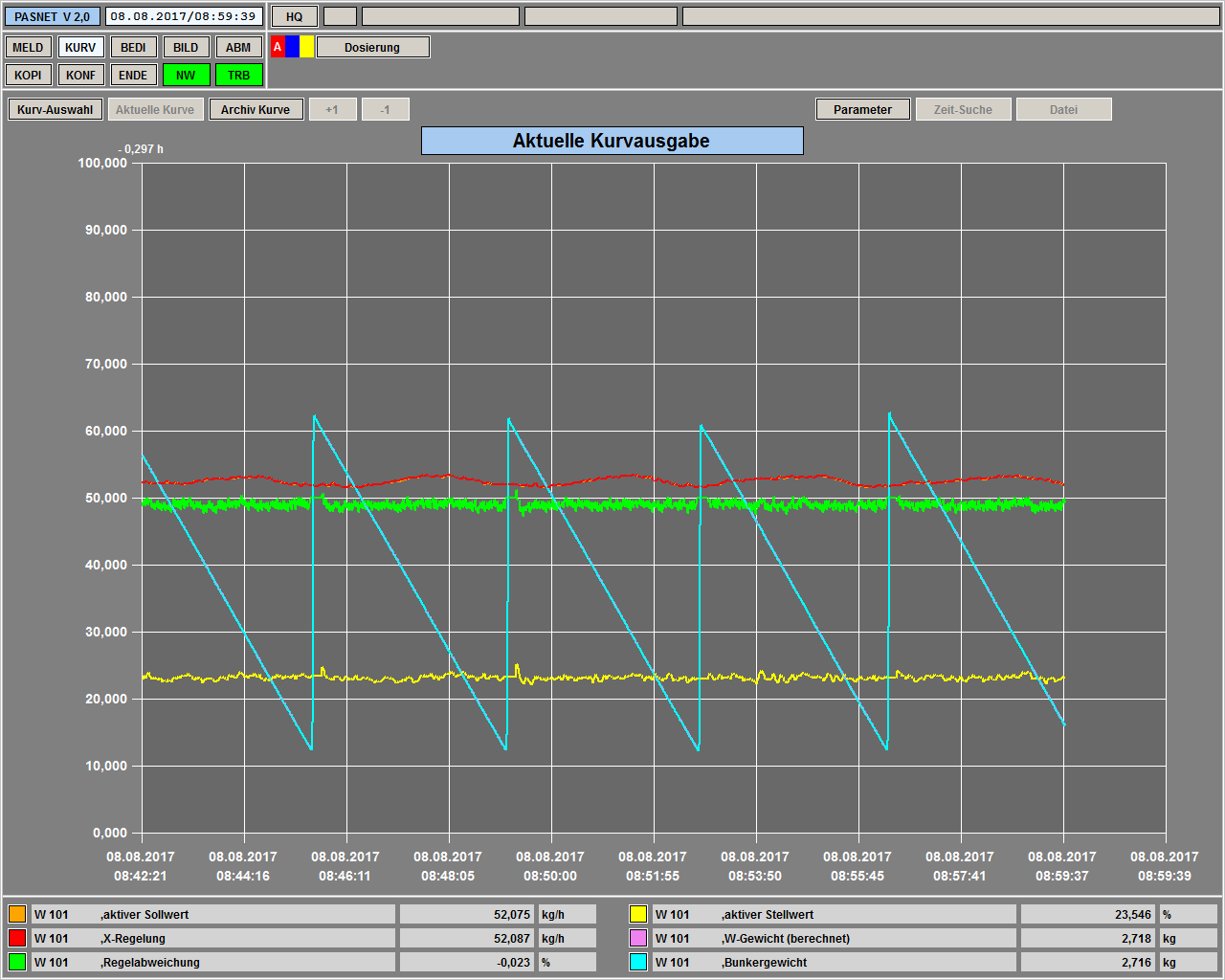
The dosing hopper and the feeder (or other devices) are placed on a weighing system. A mechanically decoupled refill hopper fills the product cyclically into the dosing hopper. The decrease in the system weight per time corresponds to the dosing output.
The dosing hopper is filled (at take-off or after refilling). The value calculator takes over the weight reading. The target value calculator continuously calculates the also decreasing weight value from the decreasing system weight as the Feeder is running. The Dosing Controller continuously compares the weight reading with the calculated weight. The difference between the two values is continuously processed in a control loop to correct the dosing output. During a refill operation, the signals mean of the last 10 seconds controls the dosing output.
The products properties determine the appropriate Feeder (supplemented by additional aids / Agitators if necessary).
In batch dosing, the predetermined weight of a batch is dosed into a predetermined receiving container (mixer, bottling, etc.). The desired weight can be adjusted at the Dosing Controller or taken over by external systems. As a rule, we use smaller touch panels in conjunction with Siemens S7 controllers. Our devices achieve a very high accuracy, so that additional weighing (e.g. from the mixer) can be omitted. Depending on the application, our devices can be optimized to the required cycle time. Our batch Dosing Controller can be programmed to deliver the weight within a certain amount of time, e.g. You want to dose 1kg over one hour.
In an continuous dosing mode, the set point is specified in weight/time, the device runs continuously with this dosing output and receives the start/stop signal from a parent controller. Thanks to an automated refill, the dosing process can be run in continuous operation “24/7 .”


